

FTS – czym jest system zakończenia lotu i kiedy jest wymagany?

FTS, czyli Flight Termination System, to system zakończenia lotu, który jest koniecznym wyposażeniem w konkretnych klasach systemów BSP, ale może być również wymagany w przypadku lotów poza scenariuszami standardowymi dronami bez nadanej klasy C.
FTS został zdefiniowany w bardzo prosty sposób w dokumencie o nazwie MOC Light-UAS.2511-01, który stanowi główne źródło informacji o tej funkcji:
„A flight termination system (FTS) is a system which upon its triggering terminates the flight.”
MOC Light-UAS.2511-01
Mówiąc najkrótcej: FTS to system, którego aktywacja kończy lot BSP. Co ciekawe definicja nie zakłada wyłącznie używania systemu spadochronowego jako metody sprowadzenia BSP na ziemię, choć to właśnie spadochron jest najczęstszym elementem tego systemu.
Tak jak cały dokument (w skrócie) MOC 2511 tyczy się tzw. „powstrzymania” (ang. containment) tak i FTS jest nierozłącznie związany z tym pojęciem – jest bowiem systemem „powstrzymującym” BSP przed dalszym niekontrolowanym lotem w przestrzeń przyległą i nad obszar przyległy do obszaru operacji. Zacznijmy jednak od początku…
FTS – „ostatnia deska ratunku”
Operatorzy/piloci latający w kategorii otwartej, a nawet i w szczególnej (np. na podstawie krajowych NSTS), rzadko kiedy zastanawiają się nad rozplanowaniem swojej operacji poprzez wyznaczenie przestrzeni lotu (Flight Geography), przestrzeni bezpieczeństwa (Contingency Volume) oraz bufora ryzyka naziemnego (Ground Risk Buffer). Terminy te wchodzą jednak na stałe do użycia w przypadku omawiania zasad wykonywania lotów na podstawie unijnych STS, a jeszcze lepiej znane są operatorom wnioskującym o zezwolenie całkowicie poza scenariuszami standardowymi. Dla tych, którzy nie siedzą tak głęboko w tym temacie poniżej prosta wizualizacja:

„Powstrzymanie”, o którym mowa w MOC 2511 jest podstawą do zastosowania (i w razie konieczności użycia) FTS i tyczy się zabezpieczenia BSP przed możliwym dolotem do obszaru przyległego (Adjacent Area). W razie utraty kontroli sterowania i wylotu BSP poza granicę przestrzeni bezpieczeństwa (Contingency Volume) w ramach procedury awaryjnej aktywowany jest FTS (automatycznie bądź manualnie) tak, by dron zakończył swój lot (na ziemi) nie dalej niż w buforze ryzyka naziemnego (Ground Risk Buffer).
Kiedy FTS jest wymagany?
Są zasadniczo trzy podstawowe przypadki, w których FTS jest wyposażeniem wymaganym w systemie BSP: do lotów w ramach STS-01/02, a zatem dronami klasy C5 i C6, także do lotów na podstawie predefiniowanych ocen ryzyka PDRA S-01 i S-02 bazujących na STS (przy czym nie występuje tutaj wymóg posiadania systemu klasy C5 i C6). Trzecia sytuacja zakłada operacje na zezwoleniu w oparciu o metodykę SORA w przypadkach wystąpienia wymogu tzw. „wzmocnionego powstrzymania”, które może wynikać z kilku innych kwestii. Nie jest natomiast wymogiem do lotów w kategorii otwartej ani też w krajowych scenariuszach NSTS.
Wymóg stosowania FTS w STS
Choć nigdzie w rozporządzeniach UE 2019/947 ani 2019/945 wprost nie występuje termin „FTS”, wskazania do jego stosowania znajdują się w kilku miejscach tych rozporządzeń.
W rozporządzeniu 2019/947 w sekcji UAS.STS-01.040 Obowiązki pilota bezzałogowego statku powietrznego zawierającej zapisy obowiazków pilota BSP latajacego na zasadach STS-01 widnieje formuła:
Oprócz obowiązków określonych w sekcji UAS.SPEC.060 pilot bezzałogowego statku powietrznego:
1) przed rozpoczęciem operacji z użyciem systemu bezzałogowego statku powietrznego weryfikuje, czy środki służące zakończeniu lotu bezzałogowego statku powietrznego funkcjonują, oraz sprawdza, czy system jednoznacznej zdalnej identyfikacji jest aktywny i aktualny;2) podczas lotu:
h) stosuje procedury awaryjne określone przez operatora systemu bezzałogowego statku powietrznego na potrzeby sytuacji awaryjnych, w tym uruchamia środki służące zakończeniu lotu, w przypadku gdy pilot bezzałogowego statku powietrznego ma przesłanki, by sądzić, że bezzałogowy statek powietrzny może przekroczyć granice przestrzeni operacyjnej.
Zapisy wymagające sprawdzenia czy FTS jest aktywny zostały zawarte także w wytycznych do szkolenia praktycznego do STS-01:
(ii) Przegląd przedlotowy i konfiguracja systemu bezzałogowego statku powietrznego (w tym tryby lotu i zagrożenia związane ze źródłami energii). Kwestie, które należy uwzględnić:
(G) upewnienie się, że zamontowany w systemie bezzałogowego statku powietrznego układ umożliwiający zakończenie lotu i jego system aktywacji są sprawne;
W przypadku zasad lotów dla STS-02 odpowiednie fragmenty w rozporządzeniu 2019/947 brzmią podobnie, przy czym dla STS-02 jest dodatkowo zapis:
Operacje z użyciem systemów bezzałogowych statków powietrznych zgodnie z STS-02 są wykonywane:
2) nad kontrolowanym obszarem naziemnym w całości znajdującym się w słabo zaludnionym środowisku, obejmującym:
c) bufor ryzyka naziemnego obejmujący odległość co najmniej równą odległości, którą najprawdopodobniej pokona bezzałogowy statek powietrzny po aktywacji środków służących zakończeniu lotu wskazanej przez producenta systemu bezzałogowego statku powietrznego w instrukcji
producenta, z uwzględnieniem warunków operacyjnych przy ograniczeniach określonych przez producenta systemu bezzałogowego statku powietrznego;
Pamiętając, że STS-01 wymaga zastosowania drona klasy C5, a STS-02 drona klasy C6 możemy oczekiwać, że w rozporządzeniu UE 2019/945 znajdziemy zapisy o stosowaniu „systemu zakończenia lotu” w częściach opisujących poszczególne klasy C dronów:
W Części 16 dotyczącej klasy C5 mamy zapis, iż system BSP tej klasy musi spełniać m.in. wymóg:
5) z wyjątkiem bezzałogowych statków powietrznych na uwięzi, umożliwiać pilotowi bezzałogowego statku powietrznego zakończenie lotu bezzałogowego statku powietrznego w sposób:
a) niezawodny, przewidywalny i niezależny od automatycznego systemu kontroli lotu i naprowadzania; dotyczy to również aktywacji tego narzędzia;
b) wymuszający opadanie bezzałogowego statku powietrznego i zapobieganie jego aktywnemu przemieszczaniu się w płaszczyźnie poziomej; oraz
c) obejmujący środki zmniejszania efektu uderzenia bezzałogowego statku powietrznego;
W Części 17 z kolei (dotyczy klasy C6) zapis mówi, iż system C6 musi:
5) umożliwiać pilotowi bezzałogowego statku powietrznego zakończenie lotu bezzałogowego statku powietrznego w sposób:
a) niezawodny, przewidywalny i niezależny od automatycznego systemu kontroli lotu i naprowadzania oraz niezależny od środków zapobiegania przekraczaniu przez bezzałogowy statek powietrzny pionowych i poziomych limitów, zgodnie z wymogami pkt 4; dotyczy to również aktywacji tego narzędzia; oraz
b) wymuszający opadanie bezzałogowego statku powietrznego i zapobieganie jego aktywnemu przemieszczaniu się w płaszczyźnie poziomej;
Ostatecznie w przypadku STS-01/02 użytkownik drona (operator/pilot) nie specjalnie musi martwić się samodzielnym doposażaniem drona w moduł FTS ponieważ gotowy dron sprzedawany od razu z klasą C5 lub C6 powinien mieć system zakończenia lotu w standardzie co wynika wprost z przepisów. Nieco inaczej sprawa wygląda w przypadku zakupu drona klasy C3 i chęci „upgrade’owania go” do klasy C5 – wtedy to użytkownik musi zadbać o zakup zestawu akcesoriów klasy C5 (w skład których wchodzi właśnie FTS najczęściej ze spadochronem) i zgodnie z instrukcją zintegrować go z dronem klasy C3 by cały system BSP łącznie mógł być traktowany jako C5. Jedna dodatkowa uwaga:
Prawo (rozporządzenie 2019/945) nie przewiduje takiej opcji upgrade’u (z klasy C3) do klasy C6 mimo, że na rynku są oferty sprzedaży zestawów upgrade’ujących klasy C6.
Załącznik Część 16 i Część 17 do rozporządzenia (UE) 2019/945
Wymóg stosowania FTS w PDRA S-01 i S-02
Na rynku można obecnie znaleźć moduły FTS do wielu różnych modeli BSP – niekoniecznie rozszerzające ich klasę do C5 lub C6. Najpopularniejsze produkują dwie francuskie firmy: DRONAVIA i FlyingEye. Można je dostać również w polskiej dystrybucji np. tutaj dostępne są FTS do dronów DJI.
W przypadku lotów na podstawie PDRA S-01 lub S-02 klasa SBSP nie ma większego znaczenia, ponieważ obydwa PDRA (predefiniowane oceny ryzyka – sposób na uzyskanie zezwolenia od urzędu, bez przechodzenia całej procedury SORA) zakładają zasady lotów jak w STS-01 i odpowiednio STS-02, z tą różnicą, że nie wymagają od użytkownika posiadania systemu SBSP klasy C5 lub C6 (wtedy operator/pilot mógły wprost skorzystać z STS-01 i STS-02). Nie mniej – PDRA S-01 i S-02 zakłada używanie do lotów dronów, które spełniają wszystkie wymogi klasy C5 i C6, ale zwyczajnie jej nie otrzymały (proces certyfikacji jest długi i kosztowny, więc…). Stąd właśnie wymóg stosowania FTS również w PDRA.
Wymóg stosowania FTS w przypadku zezwolenia na podstawie SORA
W przypadku operacji, dla których wymagane jest przeprowadzenie analizy ryzyka i uzyskanie zezwolenia od ULC, ocena ryzyka w końcowym etapie procesu SORA (w wersji SORA 2.0 to Krok #9) może wykazać iż ryzyko na ziemi i w powietrzu jest znacząco większe w przestrzeni przyległej do przestrzeni operacji niż w samej przestrzeni operacji. Łatwo sobie to wyobrazić na przykładzie: planujemy lot na obrzeżach dużego miasta, na terenie rolniczym lub zwyczajnie słabo zaludnionym. Sam obszar operacji nie zawiera w sobie żadnej zabudowy mieszkalnej, nie ma tam osób postronnych więc operacja jest z pozoru bezpieczna do wykonania nawet dużym dronem. Problem może pojawić się jednak w sytuacji utraty kontroli nad BSP, która doprowadzi do jego wylotu (bez możliwości sterowania) poza przestrzeń operacji. W takich sytuacji jeśli dron może przemieszczać się ze znaczącą prędkością – w ciągu kilku minut może znaleźć się na gęsto zaludnionym obszarem miejskim lub np. w przestrzeni kontrolowanej pobliskiego lotniska. Zatem ryzyko jest wtedy znacznie większe w tych obszarach i przestrzeniach przyległych niż na samym obszarze/w samej przestrzeni operacji. W takiej sytuacji operator jest niejako zmuszony (by dostać zezwolenie na taką operację) wykazać ULC, że jest w stanie zapewnić „wzmocnione powstrzymanie” BSP przed wylotem daleko poza przestrzeń operacji gdzie ryzyko jest większe. W uproszczeniu sprowadza się to do wykazania stosowania systemu FTS, który ma przed tym zabezpieczyć.
Powyższe wyjaśnienie rodzi nowe pytania np. jak daleko od przestrzeni operacji/bufora ryzyka naziemnego powinno się rozpatrywać przestrzenie/obszary przyległe i od czego one zależą? Jak powinien działać FTS, żeby zapewnić to „wzmocnione powstrzymanie” przed odlotem BSP?
Zanim jednak odpowiem na te pytania wypada napisać jasno, do jakich operacji musimy (jako operator) zastosować „wzmocnione powstrzymanie” – tę kwestię dość klarownie wyjaśniono w Easy Access Rules for UAS, przy opisie metodologii SORA: rozdział „AMC1 Article 11 Rules for conducting an operational risk
assessment – SPECIFIC OPERATIONS RISK ASSESSMENT (SORA) (SOURCE JARUS SORA V2.0) – EDITION December 2020″ w sekcji: 2.5.3 Step #9 – Adjacent area/airspace considerations (c):
The enhanced containment applies to operations conducted:
2.5.3 Step #9 – Adjacent area/airspace considerations (c)
(1) either where the adjacent areas: (i) contain assemblies of people unless the UAS is already approved for operations over assemblies of people; or (ii) are ARC-d unless the residual ARC of the airspace area intended to be flown within the operational volume is already ARC-d;
(2) Or where the operational volume is in a populated area where: (i) M1 mitigation has been applied to lower the GRC; or (ii) operating in a controlled ground area.
Zatem „wzmocnione powstrzymanie” ma zastosowanie w operacjach:
- w których obszar przyległy (i) zawiera zgromadzenia osób, chyba że SBSP został zatwierdzony do lotów nad zgromadzeniami osób, albo (ii) klasa ryzyka w powietrzu jest ARC-d, chyba że finalna klasa ARC dla przestrzeni operacji jest również ARC-d;
- lub gdy przestrzeń operacji jest w obszarze gęsto zaludniony, gdzie (i) zastosowano mitygację M1 do zmniejszenia klasy GRC ryzyka naziemnego, lub (ii) operacja będzie odbywać się nad kontrolowanym obszarem naziemnym.
Upraszczają w formie przykładu – „wzmocnione powstrzymanie” będzie konieczne:
- jeśli obszar przyległy do naszego obszaru operacji to miasto, gdzie potencjalnie może wystąpić zgromadzenie osób (oczywiście w czasie planowanej przez nas operacji operacji) tudzież w mieście jest lotnisko z kontrolowaną przestrzenią CTR/MCTR (co skutkuje klasą ARC-d);
- jeśli planujemy lot w obszarze gęsto zaludnionym (np. w mieście) i stosujemy już mitygację strategiczną M1 (ograniczenie czasu, miejsca i ekspozycji), tudzież planujemy zapewnić naziemny obszar kontrolowany dla naszej operacji czyli lot jest nad ogrodzonym lub w inny sposób zabezpieczonym przed dostępem osób postronnych terenem;
Punkt (d) tej samej sekcji zawiera dodatkowo wymogi bezpieczeństwa dla „wzmocnionego powstrzymania”, ale te przekłądają się wprost na wymogi techniczne FTS określone w MOC 2511 więc na nich się skupimy.
Wróćmy do pytania: jak daleko od przestrzeni operacji i bufora ryzyka naziemnego rozciąga się przestrzeń przyległa/obszar przyległy, który mamy ocenić aby jednoznacznie stwierdzić czy w ogóle potrzebujemy „wzmocnionego powstrzymania”? Co ciekawe metoda SORA 2.0, która aktualnie jest w użyciu nie zakłada żadnych konkretnych obliczeń. W Easy Access Rules for UAS jest jedynie stwierdzenie:
Ponieważ nie jest możliwe przewidzenie wszystkich lokalnych sytuacji, operator UAS, właściwy organ (w Polsce ULC) i ANSP (w Polsce PAŻP) powinni kierować się zdrowym rozsądkiem w odniesieniu do oceny „sąsiedniej przestrzeni powietrznej”, jak również „sąsiednich obszarów”. Na przykład w przypadku małego BSP o ograniczonym zasięgu definicje te nie będą obejmować ruchliwych lotnisk/heliportów oddalonych o 30 kilometrów. Przestrzeń powietrzna granicząca z przestrzenią operacji powinna być punktem wyjścia do określenia sąsiedniej przestrzeni powietrznej. W wyjątkowych przypadkach może również być brana pod uwagę dalsza przestrzeń powietrzna, wychodząca dalej poza granice tych objętości.
Powyższe stwierdzenie, mimo że reprezentuje „elastyczne” podejście do oceny odległości przyległych przestrzeni i obszarów – wcale nie ułatwia całego procesu SORA, bo wymaga konsultacji tych obszarów i przestrzeni z ULC i PAŻP, a umówienie się na takie konsultacje bywa problematyczne.
Wersja SORA 2.5, która prędzej niż później wejdzie do użytku „naprawia już to niedopatrzenie” i daje operatorowi wzór do obliczenia granic przestrzeni i obszarów przyległych. Pamiętajmy, że przede wszystkim zależy nam na granicy „zewnętrznej” (tej najbardziej od nas oddalonej) tych obszarów i przestrzeni – bowiem bliższą granicę mamy daną i wyznacza ją granica naszej przestrzeni operacji.
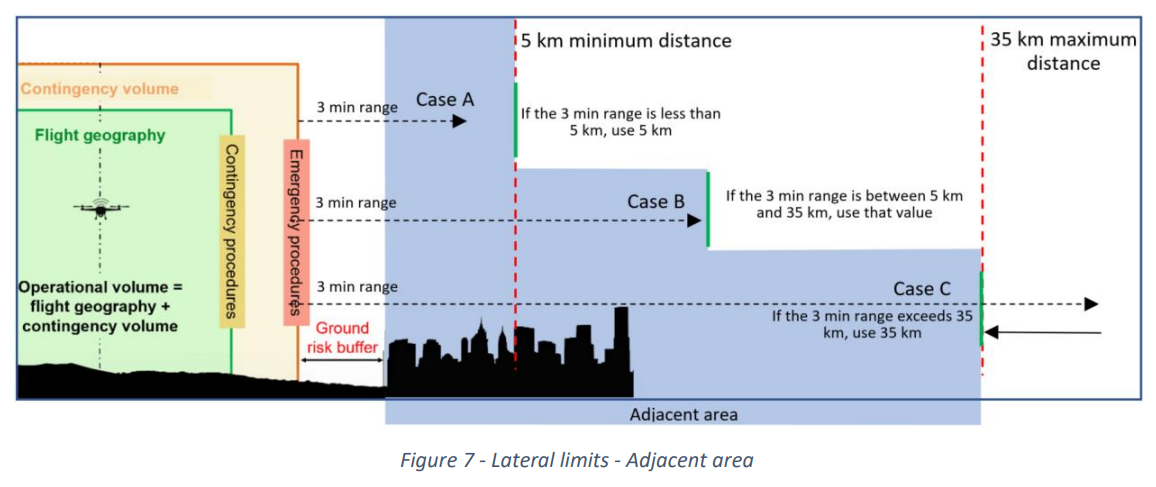
SORA 2.5 daje wytyczne do wyznaczenia odległości maksymalnej obszaru przyległego, a przestrzeń przyległa jest uważana za przestrzeń nad tym obszarem. Należy zastosować następujące obliczenie:
The lateral outer limit of the adjacent area is calculated from the operational volume as the distance flown in 3 minutes at maximum speed of the UA:
JARUS SORA Main Body 2.5
A. If the distance is less than 5 km, use 5 km,
B. If the distance is between 5 km and 35 km, use the distance calculated,
C. If the distance is more than 35 km, use 35 km.
A zatem granica „zewnętrzna” jest w odległości wyznaczonej przez 3-minutowy lot BSP z jego maksymalną prędkością poza przestrzeń operacji. Jeśli dystans jest < 5 km – należy przyjąć mimo wszystko 5 km (jako minimalną odległość), a jeśli dystans jest większy niż 35 km – należy przyjąć 35 km jako maksymalną odległość zewnętrznej granicy. Każdy wynik obliczeń, który mieści się pomiędzy 5 a 35 km można przyjąć za konkretną wyliczoną wartość tej granicy.
Nie wnikając już w dalsze szczegóły SORA 2.5 (metodologia ta wprowadza jeszcze dodatkowo trzy poziomy „solidności powstrzymania”, ale nie jest to głównym tematem tego artykułu) wróćmy zatem do sedna, czyli do samego FTS.
Wiedząc już kiedy jest nam potrzebny taki system („wzmocnione powstrzymanie” i dla jakich operacji jest ono wymagane) wróćmy do MOC 2511 – po krótce omówię zasady działania takiego systemu. W tym miejscu należy się jeszcze jedna istotna uwaga: MOC 2511 ma zastosowanie tylko dla operacji na poziomie ryzyka SAIL II, w których wykorzystywany jest BSP o typowym wymiarze maksymalnym < 3 m (ewentualnie w razie nieco większych rozmiarów urząd może dać zielone światło jeśli Ek < 34 kJ lub prędkość BSP < 35 m/s). Spełnienie wymagań MOC 2511 jest deklaratywne tzn. urząd może zwyczajnie zatwierdzić spełnienie przez operatora wymogów danego MOC 2511 na zasadzie jego deklaracji, ale samo operator powinien mieć dowody potwierdzające spełnienie wymogów MOC 2511 tak „na wszelki wypadek”…
Przechodząc jednak do konkretów – FTS zgodnie z MOC 2511:
- powinien być systemem odseparowanym od całej architektury systemu sterowania lotem;
- może być aktywowany manualnie, automatycznie lub tak i tak;
- pilot powinien mieć możliwość sprawdzenia w dowolnym momencie lotu czy system jest sprawny (np. poprzez informację przekazywaną drogą radiową);
Spełnienie pierwszego wymogu jest kluczowe, bowiem FTS ma zapewnić pilotowi możliwość zakończenia lotu po utracie kontroli nad BSP – oczywistym jest, że jeśli FTS nie będzie odseparowany od systemu kontroli lotu BSP to w sytuacji utraty kontroli nie byłoby możliwości aktywowana FTS – stąd wymagana jest osobna architektura systemowa dla systemu sterowania/kontroli nad lotem i systemu aktywacji FTS.
Drugi wymóg daje możliwość wyboru: czy FTS ma być jedynie automatycznie aktywowany czy również (lub tylko) ręcznie. W przypadku automatycznego systemu operator musi zapewnić rozdzielność jedynie „powietrznego modułu FTS” od systemu kontroli lotu, a w przypadku ręcznego aktywowania – również „moduł naziemny FTS” musi być odseparowany. Co to oznacza? Że do aktywacji FTS nie można używać tej samej aparatury sterującej (np. jej standardowych przycisków/przełączników) jeśli funkcja aktywacji nie została odseparowana od całego systemu kontroli. W praktyce oznacza to zastosowanie osobnych nadajników i odbiorników sygnału dla FC (kontrolera lotu) i FTS, a także osobnych włączników wyzwalających sam FTS. Z kolei konieczność „odseparowania” modułu powietrznego powoduje, że FTS nie powinien korzystać np. z tego samego źródła zasilania czy GPS, który jest wykorzystywany do sterowania i nawigowania dronem, bowiem utrata kontroli związana z utratą zasilania lub GPS zintegrowanego z FC spowoduje, że również FTS nie zostanie aktywowany. W przypadku obydwu modułów (naziemnego i powietrznego), które tak czy inaczej muszą komunikować się drogą radiową – należy zapewnić częstotliwość komunikacji inną niż ta, z której korzysta sam dron do kontroli lotu. Powód wiadomy: jeśli utrata kontroli nastąpi z powodu zakłócenia częstotliwości radiowej sterowania w dronie to i FTS nie zadziała. Wyjątek stanowi tutaj łączność radiowa oparta o sieci komórkowe – w MOC 2511 jest zawarte zalecenie, iż w takiej sytuacji FTS i FC powinny korzystać z różnych dostawców sieci komórkowych.
Mając wszystkie powyższe informacje na względzie nie powinnien dziwić zatem fakt, że ilość dostępnych FTS na rynku jest niewielka – w zasadzie dwie wspomniane wyżej firmy oferują szerzej swoje produkty dla konkretnych modeli, ale są one przeznaczone do lotów VLOS (z racji ograniczenia zasięgu łączności radiowej z FTS).
Sam FTS nie jest w założeniu złym systemem, bowiem faktycznie jest „ostatnią deską ratunku” w przypadku „zerwania się drona” i utraty kontroli. Jednak w dość gęsto zaludnionej Polsce z wieloma strefami kontrolowanymi w dużych miastach w zasadzie bez FTS nie będzie dało się latać w kategorii szczególnej po zakończeniu obowiązywania krajowych scenariuszy NSTS. Dla posiadaczy dronów klasy C5 i C6 to będzie standard, ale do dalekich lotów BVLOS na podstawie SORA brak dostępnych FTS na rynku opartych o łączność komórkową, może skutecznie zahamować i tak już dość mocno zatrzymany przez regulacje unijne rynek usług BSP.
Warto też pamiętać, że każdy dodatkowy moduł „bezpieczeństwa” montowany w BSP to koszt, który finalnie ponosi sam użytkownik drona. Brak jest realnych dowodów na to, że FTS podnosi znacząco bezpieczeństwo, są to jedynie teoretyczne wyliczenia matematyczne. Nie ma żadnych istotnych danych dotyczących incydentów z utratą sterowania nad dronem, a informacje podawane przez Agencję odnośnie incydentów z udziałem BSP są rzędu kilkunastu do kilkudziesięciu niegroźnych przypadków rocznie. Od niemal dwóch dekad przeróżne modele małych i całkiem sporych BSP latały w Polsce w miastach i w ich pobliżu, w strefach kontrolowanych i w ich niedalekim sąsiedztwie. Oczywiście obecnie ich ilość jest znacznie większa, ale i sprzęt jest technologicznie dojrzalszy i mniej zawodny. Ile sumarycznie przez cały ten czas było przypadków realnie zagrażających osobom postronnym po utracie kontroli nad BSP, w ilu z tych przypadków obecność FTS na pokładzie by cokolwiek zmieniła?


Jeśli treść powyższego artykułu była dla Ciebie przydatna lub ciekawa możesz postawić mi kawę, którą uwielbiam i motywuje do dalszego pisania ;)




{kind=link}
Brak komentarzy