
Yuneec Typhoon H520 moim okiem

Hexacopter Yuneec Typhoon H520 trafił do mnie na testy dzięki uprzejmości firmy aeroMind z Poznania, która jest autoryzowanym dystrybutorem produktów firmy Yuneec (między innymi). Początkowo miał zostać u mnie na weekend, potem na 4-5 dni, aż został na ponad tydzień – wszystko z powodu pogody, która skutecznie utrudniała jakiekolwiek loty. Ostatecznie udało się wylatać kilka pakietów – podczas silnego wiatru i niskiej temperatury, ale przynajmniej nie padało… Co myślę o Typhoon H520?
Muszę od razu zaznaczyć, że nigdy wcześniej nie miałem okazji latać sprzętem spod znaku Yuneec. Przyjąłem go więc „z otwartymi ramionami”. Starałem się podejść do sprzętu jak totalny nowicjusz. Zacząłem od przeczytania całej instrukcji… dwa razy. Przez pierwsze 4 lub 5 dni Typhoon H520 i tak przeleżał w biurze (deszcz/wiatr – nie ryzykowałem sprzętu za ponad 12 tyś. PLN) więc był czas na czytanie oraz dokładne przyjrzenie mu się w szczegółach.
Zacznijmy zdjęć z „unboxingu”:


Ponieważ z gotowych konstrukcji (dronów RTF w stylu Phantom itp.) do tej pory miałem najwięcej do czynienia z firmą DJI to nieuniknione będą porównania do tej właśnie marki. Zresztą nie powinno to dziwić – na rynku dronów komercyjnych ze średniej i wyższej półki modele Yuneec są właśnie największą konkurencją dla DJI.
Ogólne wrażenia
Absolutnie pierwsze wrażenie po wyjęciu całości sprzętu z pudła i obejrzeniu go z bliska było takie: wreszcie dron RTF, który kojarzy się z typowo modelarskim sprzętem, a nie z zabawką zdalnie sterowaną. Zamiast wszechobecnego białego plastiku („pstryczek w nos” dla DJI Phantom) – węglowe ramiona i nogi podwozia, składane a nie na stałe rozłożone, wreszcie aparatura RC z prawdziwego zdarzenia najeżona przełącznikami, suwakami, pokrętłami. No i w końcu coś w kolorze innym niż biały, bardzo praktyczne w użytkowaniu (nie brudzi się, nie świeci, bo jest matowe). Dla osoby od lat związanej z modelarstwem, obcującej z karbonem i czarnym aparaturami (standard na rynku RC) to „miód na oczy” ;).
Wygląd
Postaram się uniknąć powtarzania rzeczy, na które uwagę zwróciłem już wyżej. Kadłub Yuneec Typhoon H520 jest wykonany z twardego matowego plastiku w kolorze pomarańczowym. To główny element, który odróżnia go od swojego poprzednika czyli Typhoon H, który był cały czarny. Kolor pomarańczowy jest o wiele lepiej widoczny na ciemnym tle, co ma znaczenie szczególnie teraz – gdy dni bywają ciemne, pochmurne, a na tle gołych drzew czarne drony są jeszcze słabiej widoczne. Od góry dookoła pomarańczowej kopuły przykrywającej elektronikę znalazł się czarny lakierowany pasek z otworami wentylacyjnymi w tylnej części oraz niżej na bokach. Na przedzie czarnego paska znajduje się przycisk włączania drona. GPS został wyraźnie oznaczony na obudowie – podpisem i wysklepieniem.

Ramiona i podwozie wykonane jest z błyszczących węglowych rurek, które nadają całości fajnego charakteru. Jeśli ktoś jest przyzwyczajony jedynie do białych Phantomów spod znaku DJI zapewne nie zwróci na to uwagi. Mnie natomiast przypomina to modelarskie początki z węglową ramą Tarot 650, na której „rzeźbiłem” swój pierwszy quadcopter i są to bardzo przyjemne wspomnienia! Ramiona na obu końcach zostały oprawione w pomarańczowy plastik – z jednej strony trzyma on silnik (od spodu oświetlenie), a z drugiej znajduje się zatrzask z systemem zwalniania, by móc rozkładać i składać ramiona w szybki i prosty sposób.
Do testów otrzymałem wersję bez czujników Intel RealSense, a w standardzie Typhoon H520 ma zamontowane dwa przednie sensory wykrywające (skutecznie) przeszkody przed sobą.

Yuneec Typhoon H520 zrobił na mnie wrażenie swoim rozmiarem… jak na hexacopter jest naprawdę niewielki! Pudełko na drona jest wprawdzie całkiem spore, ale jest w nim dużo pustych przestrzeni, by dobrze zabezpieczyć drona na czas transportu. Sam H520 ze złożonymi ramionami jest niewiele większy od DJI Phantom 4. Na pewno jest od niego wyższy, ale to uważam akurat za zaletę. Podwozie jest szerokie i nie ma szans na przypadkowe przewrotki przy lądowaniu co było problemem w Phantomach 2/3 na nierównym podłożu (w Phantomach 4 podwozie zostało nieco wydłużone).



Zasilanie – pakiety Lipo i ładowarka
Zacznę od ładowarki. Ta jest prosta i intuicyjna w obsłudze. Pakiet do ładowania można wetknąć tylko na jeden sposób pakiet, status ładowania sygnalizowany jest diodami na ładowarce, a sygnał dźwiękowy daje nam znać, iż bateria została w pełni naładowana.


Co do pakietów: te też są proste, aż.. za bardzo. Czemu? Bo wyglądają jak zwykłe pakiety Lipo oprawione w kawałek plastiku tak, by dobrze pasowały do obudowy. Oczywiście pakiet ma swoją yuneec’ową wtyczkę bezpośrednio w obudowie lipola, więc nie doświadczymy tu żadnych wiszących kabli. Przydałby się jednak jakikolwiek – nawet najprostszy – moduł z sygnalizacją jej napięcia (choćby diodami jak w DJI), bo niestety nie można sprawić czy jest ona naładowana póki nie wetkniemy jej do drona i go nie uruchomimy. Można się śmiać z „inteligencji” pakietów DJI, ale chociaż wiadomo czy są naładowane, nie mówiąc już o cyklach ich ładowania, procentowej pojemności pokazującej zużycie pakietu, możliwości samoczynnego rozładowania do przechowywania itd. Zrozumiałbym jeszcze, że Yuneec zrezygnował z tego typu inteligentnych modułów na rzecz ich ceny, ale niestety nie – akumulator do H520 to koszt 820zł.





Aparatura RC – ST16S
Jak już wspomniałem wyżej aparatura RC do Yuneec Typhoon H520 to sprzęt, który przypadnie do gustu każdemu, kto miał w rękach prawdziwie modelarską aparaturę sterującą. Jako wieloletni użytkownik radia Hitec Aurora 9, z aparaturą ST16S w rękach czułem się, jakbym używał jej od dawna. Przyswojenie wielu różnych przycisków i przełączników nie sprawiło mi najmniejszego problemu, bo są one dość intuicyjnie rozłożone, a ja uwielbiam radia z dużą ilością przełączników. Poza tym niech Was nie zmyli duży rozmiar radia ST16S. Nie jest ani przesadnie ciężkie, ani niewygodne w trzymaniu – dorosły mężczyzna nie powinien odczuć tej wagi w rękach, a jeśli komuś bardzo będzie doskwierać to jest możliwość przypięcia 4-punktowego paska (zamiast jednego zaczepu w DJI!), który będzie utrzymywał wiszącą aparaturę zawsze w pozycji poziomej niczym radia pulpitowe. Takie zawieszenie pozwoli ma precyzyjne pilotowanie Yuneec’a trzymając drążki palcami wskazującymi i kciukami – nie samymi kciukami.

Systemem obsługującym podczas lotu Yuneec’a i zainstalowanym na urządzeniu mobilnym sprzężonym z całym radiem jest system Android 4.4.4 (już 4-letni nienajnowszy system), a aplikacja to DataPilot. Można ustawić by aplikacja uruchamiała się wraz z włączeniem radia, ale z urządzenia mobilnego można korzystać jak z każdego tabletu również do innych celów.
Pierwszy „mały” zgrzyt następuje w momencie, gdy dowiecie się, że aparatura nie ma możliwości w trybie pracy „on-line” korzystając z danych komórkowych przez kartę SIM. Jedyna opcja podłączenia jest po WiFi i służy przeważnie do aktualizacji oprogramowania lub zaciągania map terenu w warunkach domowo-biurowych. Niestety to powoduje, że jeśli nie ściągniemy map danego terenu w domu, to nie będziemy mieć tych map w terenie. Do samego lotu aparatura łączy się po WiFi z kamerą więc odpada możliwość łączenia się radia w trakcie lotu po udostępnionym WiFi np. z telefonu komórkowego. Oczywiście jest jeszcze opcja pobrania map przez WiFi-spot z telefonu, zanim połączymy się z kamerą. Wciąż jest to spore utrudnienie i wymaga przygotowania się w 100% na filmowanie konkretnego terenu dużo wcześniej.
Kolejny minus, który wyłapałem już na samym początku (jeszcze przed pierwszym użyciem aparatury) to bardzo długi czas jej ładowania. Gdy wyjąłem ją z pudełka status naładowania wskazywał 2%. Po podpięciu do ładowarki przez microUSB w pełni naładowana była dopiero po 5 lub 6 godzinach nieużywania i ciągłego ładowania. Oczywiście jeśli weźmiemy pod uwagę fakt, że w ST16S dostajemy tablet i aparaturę w jednym to ten czas jest do usprawiedliwienia. Nie mniej – jeśli zapomnimy o naładowaniu aparatury wcześniej to już jej niestety nie naładujemy tuż przed lotem.
Co do samej obsługi zarówno DataPilota nie mam większych zastrzeżeń. Wszelkie ustawienia są dość intuicyjnie rozmieszczone, choć inaczej niż w oprogramowaniu DJI Go/Go 4 co u użytkowników sprzętu tego producenta może początkowo powodować problemy. Powiedziałbym, że opcji jest mało (w stosunku do nowszych dronów DJI, bo odpada obsługa inteligentnych baterii, wielu czujników antykolizyjnych, opcji stricte internetowych), ale w rzeczywistości jest wszystko co potrzeba do pełnej obsługi Typhoona H520.

Niewątpliwą zaletą oprogramowania DataPilot jest możliwość planowania misji autonomicznych. To tutaj oprogramowanie pokazuje pełnię możliwości. Prócz tradycyjnego programowania lotów po siatkach i pojedynczych waypointach (wysokości, czasu lotu pomiędzy punktami, prędkości, zmiany wysokości itp. itd.) mamy pełną możliwość ustawienia kamery i gimbala. Możemy zatem w trybie automatycznym zaprogramować, co i jak kamera ma robić podczas lotu: jak się ustawić, pod jakim kątem, jak zmieniać kąt filmowania, czy robić video, zdjęcie czy serię, jak obracać gimbalem. Znajdą się tacy, którzy powiedzą: po co to wszystko, skoro płynniej i szybciej będzie to zrobić manualnie. To teraz wyobraźcie sobie, że chcecie zrobić taki sam lot wiele razy, o różnych porach dnia, porach roku, a potem zrobić jeden film z danego miejsca łącząc te wszystkie nagrania i filmy. Nie ma możliwości ręcznie wykonać dwóch identycznych nagrań – Yuneec Typhoon H520 robi to bezproblemowo, importując jedynie zapisany scenariusz i odtwarzając go w dowolnym momencie w ten sam zaprogramowany sposób. Ta funkcja (rodem z kontrolerów APM/PixHawk) miażdży każdą inną funkcję z oprogramowania DJI Go.

Wracając jeszcze do samych przełączników i pokręteł. Po niedługim, bo zaledwie nieco ponad 2-godzinnym użytkowaniu H520 wyłapałem 2 mankamenty, które osobiście mi przeszkadzały. Nie są to rzeczy „nie do ogarnięcia”, ale z pewnością wymagają dłuższego przyzwyczajenia się do nich. Chodzi o sterowanie gimbalem „góra-dół” (oś TILT) i przycisk włączania/wyłączania silników.
Co do TILT’a i sterowania gimbalem góra/dół – suwak za to odpowiedzialny jest w odpowiednim miejscu (z tyłu z lewej strony), ale mam wrażenie, że chodzi on dość opornie i przy każdej okazji „ruszenie nim z miejsca” było w moim przypadku opóźnione. Nie ma na nim zębatki jak w przypadku pokręteł DJI, a jedynie jeden „ząbek”, na którym należy położyć palec wskazujący, by móc odpowiedni sterować nachyleniem kamery. To powoduje, że pilot lub operator samej kamery musi trochę polatać, żeby obsługiwać ją płynnie VS pokrętło DJI, które działa jednak prościej i intuicyjniej.
Co do przycisków „start/stop” odpowiedzialnego za start lub wyłączanie awaryjne silników – ten został umieszczony z lewej strony całkiem z tyłu aparatury i wydawałoby się, że jest to miejsce zupełnie bezpieczne. Nic bardziej mylnego! Przynajmniej nie w moim przypadku… Z przodu aparatury w niedalekiej odległości od tego przycisku znajduje się pokrętło PAN to obrotu kamery w poziomie. Pokrętło jak to pokrętło – do sterowania wymaga chwytu pęsetowego dwoma palcami (kciuk i najczęściej wskazujący palec). Żeby jednak ujęcie panoramiczne zrobić płynnie dobrze jest jeszcze oprzeć inne palce na radio zamiast trzymać dłoń w powietrzu. Problem w tym, że pokrętło jest na samej górze więc część palców opiera się o górną i tylną część radia. I w ten sposób podczas kręcenia pokrętłem PAN nacisnąłem w locie czerwony przycisk włączania/awaryjnego wyłączania silników… Na całe szczęście Yuneec Typhoon H520 zachował się „inteligentnie” i nie wyłączył bezmyślnie silników podczas lotu. Nie mniej – widać ten moment na poniższym filmie…
Na ekranie DataPilota dostałem komunikat o niemożliwości wyłączenia silników, bo dron jest w trakcie lotu. Całe szczęście, bo w sekundzie gdy zdałem sobie sprawę, że nacisnąłem ten przycisk, ciśnienie mi skoczyło tak ze 2 razy przynajmniej… Moim zdaniem ten przycisk uruchamiania silników powinien zostać przesunięty z dala od przełącznika PAN, albo należałoby zrobić podwójny przycisk (naciśnięcie dwóch naraz) do awaryjnego wyłączania silników.
Przygotowanie do lotu
Przygotowanie do lotu Yuneec Typhoon H520 jest rzeczą przyjemną acz czasochłonną, o czym będzie dalej.
Dron waży z kamerą na gimbalu około 2kg i w zasadzie niewielka różnica wagi między H520 a Phantomem 4 nie jest odczuwalna. Po przeniesieniu na miejsce należy rozłożyć ramiona do lotu – te chodzą bardzo lekko na zawiasach a blokują się na zatrzaskach. Ich składanie następuje poprzez lekkie przyciśnięcie nasady ramienia w miejscu jego łączenia z kadłubem i jest równie proste co rozkładanie. Konstrukcja blokady ramion jest oparta o metalowe zamki i wydaje się być bardzo solidna (mimo, że bardzo prosta).


Montaż śmigieł jest na szybkozłączkach, śmigła lewe i prawe są delikatnie oznaczone białym kolorem (lub jego brakiem) w samym środku podobnie jak złącza na silnikach. Poza tym sposób montażu uniemożliwia założenie śmigieł odwrotnie – na inny silnik niż to przewidziano więc jest „idioto-odporne”.



Po rozłożeniu sprzętu i wetknięciu do środka pakietu należy włączyć radio a następnie drona. Tego ostatniego włącza się jednym dotykowym przyciskiem na górnej części obudowy. W tym momencie zaczyna się oczekiwanie… które trwa nie mniej niż 2 minuty. Najpierw minutę trwa uruchomienie aparatury i aplikacji DataPilot, następną (RÓWNĄ MINUTĘ) trwa połączenie się po WiFi (5.8GHz) z kamerą. Długo? Trochę długo gdy chce się zrobić spontaniczne ujęcia w sytuacji gdy nie jesteśmy na nie do końca przygotowani, ale Yuneec H520 jako dron przemysłowy został raczej stworzony do przemyślanych i zaplanowanych nalotów ;).
Żeby zrekompensować ten czas oczekiwania wspomnę o jednej – ale to olbrzymiej o zalecie Typhoon’a miażdżącej sprzęt DJI z tej półki cenowej – chodzi o wymienne moduły gimbala+kamery. Rozwiązanie niezwykle proste, a tak bardzo ułatwiające prace w terenie w sytuacjach, gdy musimy używać kilku różnych kamer. Wymiana kamery odbywa się poprzez wymianę kamery i gimbala, który jest z nią nierozłączny – to raz. Dwa – trwa może 10 sekund, może mniej. Jeden zaczep zwalnia cały moduł, wyjmuje się go niezwykle prosto i tak samo wsuwa kolejny zamieniając np. kamerę klasyczny UHD na termowizyjną. Gimbal i kamera łączą się z dronem poprzez 6 styków, nie ma żadnych kabli, wtyczek itp. Nie uświadczycie ich również przy samym gimbalu – ten ma kable zasłonięte gumą więc nic nie dynda i nie ma się co urwać lub odpiąć przez przypadek.


Pierwszy lot
Postanowiłem nagrać mój pierwszy lot od początku do końca. Filmy jest długi i nudny, ale jakby ktoś chciał zobaczyć jak wyglądał to proszę:
Wrażenia z lotu
Łącznie podczas moich krótkich testów wylatałem około 6-7 pakietów, ale najbardziej pamiętam dwa pierwsze loty w dwóch różnych lokalizacjach. Jak pisałem wcześniej – niestety sprzęt trafił do mnie w takim okresie, że ciągle padało i wiało. Przed Yuneec’iem było zatem wyzwanie pod tytułem „stawić czoła silnemu wiatrowi w porywach do 60-80km/h”. Trochę się tego obawiałem znając cenę sprzętu i podwieszonej pod nim kamery, ale test to test. W idealnych warunkach pogodowych to żadna atrakcja!

Od pierwszego uniesienia się w powietrze i zwiększenia wysokości do ok. 30-40m nad terenem byłem pod wrażeniem stabilności konstrukcji. Spotkałem się z opinią, że Typhoon (jeszcze w wersji H/H Pro) jest mało stabilny w zawisie. Nic takiego nie zauważyłem i to w trudnych warunkach pogodowych gdy wiał porywisty wiatr! Być może blisko ziemi – z racji braku dolnych kamer jak w dronach DJI – Yuneec nie jest taki stabilny, ale wysoko w powietrzu stoi jak wryty. Wysokość podawana z barometru pokładowego pokazywała na ekranie aplikacji wahania maksymalnie o 10cm i to raz na kilka minut zawisu. Weryfikowaliśmy to również drugim dronem (DJI Phantom 4 Pro), który z góry filmował H520 i nie zauważyliśmy nawet drobnych korekt wysokości.
Mogę napisać wprost, że lataniem Typhoonem H520 to była czysta przyjemność. Podnoszone podwozie jest składane ręcznie po uniesieniu drona do góry i daje pełną swobodę działania kamerze z gimbalem (360 stopni obrotu). Czuć moc 6 silników, a zarazem działają one razem ciszej niż „mydelniczki” ze stajni DJI. Po prawej stronie z tyłu aparatury jest suwak pozwalający ustawić czułość reakcji na drążki. W trybie maksymalnej czułości i włączonym Manual Mode (VS Angle Mode, który jest odpowiednikiem trybu GPS w DJI) H520 potrafi się rozpędzić do dużych prędkości – około 60km/h. Na drążki reaguje zdecydowanie, żeby nie powiedzieć – agresywnie – i to mi się bardzo podobało! Mimo, że to maszyna do stabilniejszego latania (filmowanie, inspekcje, mapowanie) to można nią trochę poszaleć i jest z tego o wiele większa przyjemność niż latanie Phantomem, który zwyczajnie nie robi takiego wrażenia w powietrzu.



Do minusów zaliczyłbym oświetlenie, choć – jak wszystko w tej recenzji – to subiektywna ocena. Typhoon H520 to specjalistyczny sprzęt, ale przy włączony oświetleniu wygląda jak noworoczna choinka. Fajnie, że na jego bocznych ramionach mamy oświetlenie czerwone i zielone, ale przydałoby się pójść konsekwentnie za ciosem i na przedzie i z tyłu zrobić jednak oświetlenie jasne, białe, może stroboskopowe, żeby choć przypominało światła BEACON. Zamiast tego dostajemy z przodu fioletowe, a z tyłu niebieskie – łącznie 4 różne kolory, które w powietrzu na dużej wysokości i tak są dość słabo rozróżnialne mimo pochmurnej pogody (są mocno stłumione przez „mleczne” osłony żarówek).
Czas lotu podawany przez producenta nieco odstaje od realnego czasu lotu. Ze wspominanych 28 minut (maksimum) osobiście latałem około 18 minut zanim status na ekranie pokazywał 30% pakietu. Dodatkowo miałem dziwną przypadłość, która nie jest wciąż dla mnie jasna – w pierwszych lotach tego nie zauważyłem, ale m/w od 4 lotu każda nowa bateria włożona do drona (na pewno naładowana do samego końca, przynajmniej tak wskazywała ładowarka) pokazywała 77% i od tego poziomu zaczynał spadać wskaźnik czasu lotu. Niby w H520 zastosowano mocniejsze pakiety o podwyższonym woltażu (15.2V tzw. LiHV, czyli Lipo-HighVoltage) i pojemności 5250mAh , to i tak mamy tutaj aż 6 silników i większe zapotrzebowanie na prąd. DJI Phantom 4 ma praktycznie taki sam pakiet 15.2V 5350mAh, ale mniejsze zużycie prądu z racji 2 silników mniej i nim faktycznie można lecieć te 25-27 minut.


Niestety mocno odczywalne jest również zużycie prądu w aparaturze ST16S. W ciągu 7 minut lotu pojemność spadła o 8%, czyli jeden wylatany pakiet to średnio 20% zużytej baterii w radiu RC. Rachunek jest prosty – przy pełnym naładowaniu możemy wylatać bezpiecznie 4 pakiety. Na szczęście aparatura ST16S ma wymienne akumulatory, więc jeśli zaopatrzymy się w ich większą ilość to problem zostanie rozwiązany. Dodatkowo: podłączenie powerbank’a w gniazdo microUSB do ładowania da nam dodatkowy zapas energii. Zatem opcje wydłużenia pracy aparatury są co najmniej dwie, wiążą się wprawdzie z posiadaniem dodatkowych źródeł energii, ale lepsze to niż nie mieć żadnej dodatkowej opcji.
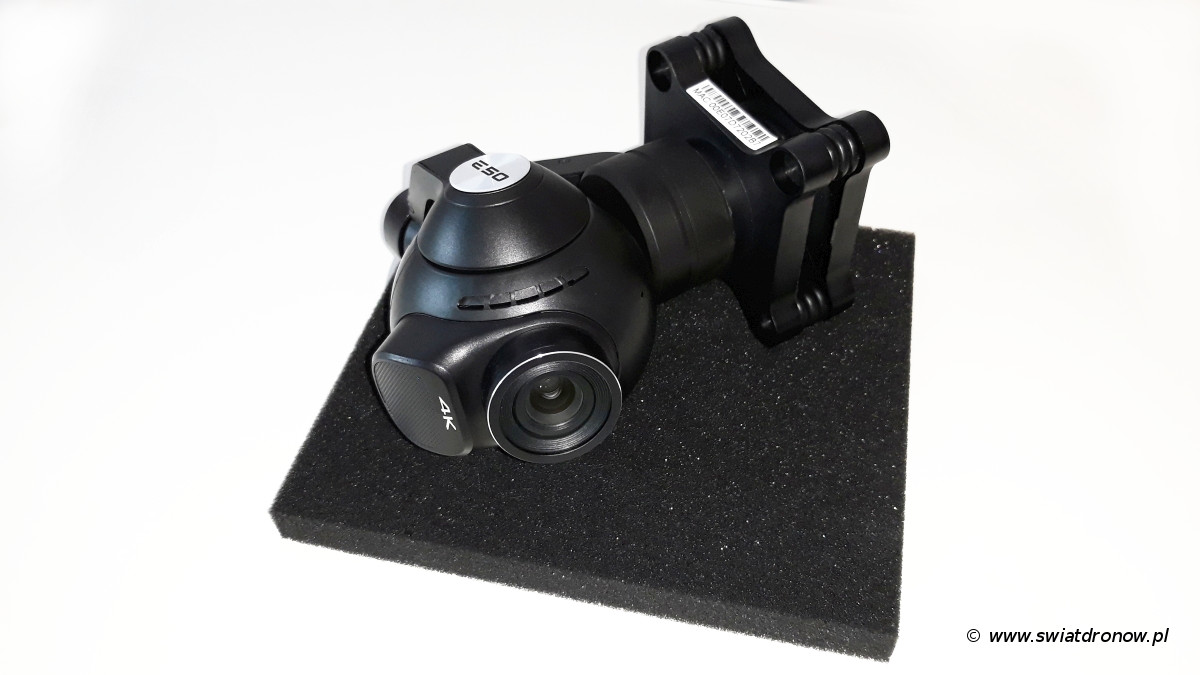
Kamery: E50 i E90
Do testów od aeroMind.pl dostałem dwie kamery z gimbalami, współpracujące z Typhoon H520: E50 i E90.

E90 to kamera z 1-calową matrycą, 20Mp w przypadku zdjęć i 4K 60fps w przypadku filmów. Posiada soczewkę o małej dystorsji, a wideo na ziemię przesyła w jakości HD 720p. Jest ona oczywiście nierozłącznie sprzężona ze swoim gimbalem i może obracać się na nim bez przerwy dookoła (360 stopni) gdy dron pozostaje ciągle w tej samej pozycji. Kamera jest polecana przez producenta zarówno do rekreacyjnego filmowania jak i do akcji SAR (Search And Rescue) oraz mapowania 2D/3D.

E50 to kamera o nieco słabszych paramterach: matryca to 1/2.3 cala, 12.4 Mp w przypadku zdjęć i 4K 30fps w przypadku filmów. Transmisja wideo do radia to również HD 720p. Podobnie jak w przypadku E90 soczewka o małej dystorsji, a sama kamera może się obracać bez przerwy dookoła na gimbalu. Dodatkowo kamera posiada adapter do 30mm standardowych filtrów w celu pełnego dostosowania kamery do warunków oświetleniowych. Producent poleca używać E50 do inspekcji wież, turbin wiatrowych, platform wiertniczych, jak również do tradycyjnego filmowania.


Obie kamery mają sloty na karty microSD, gdzie zapisywany jest cały materiał. Producent w standardzie dorzuca karty microSD do kamer (Panasonic 16Gb, klasa 10).
Biorąc pod uwagę, że Typhoon H520 to sprzęt bardziej ukierunkowany na zastosowania inspekcyjne przez ten krótki okres mojego testowania nie przykładałem wielkiej uwagi do filmowej czy fotograficznej jakości materiałów pozyskiwanych przy użyciu obydwu kamer. Oryginalne pliki możecie znaleźć w wielu miejscach w sieci, również na stronie producenta (są odnośniki do plików źródłowych bez obróbki). Żeby wydobyć pełnię możliwości z kamer należałoby poświęcić dużo więcej czasu niż mi było dane do sprawdzenia wielu różnych ustawień w różnych warunkach pogodowych. Mnie udało się zrobić jedynie kilkanaście fotek – raz w kiepskich warunkach (mgła/deszcz/wysoka wilgoć/chmury) i raz w bezchmurny słoneczny dzień, ale w mało interesującej okolicy (obrzeża miasta). Tzw. „surówki”, czyli nie obrobione zdjęcia wprost z karty, w dodatku robione w trybie Auto bez zmiany ustawień możecie znaleźć tutaj.

Odniosę się jeszcze do mojego krótkiego doświadczenia z obiema kamerami. Wyłapałem jedną rzecz, która (podobnie jak włączenie przycisku „start/stop” dla silników w locie) podniosła mi delikatnie ciśnienie. O ile z kamerą E90 nie miałem najmniejszych problemów jeśli chodzi o połączenie czy późniejszy podgląd obrazu (bez cięć, lagów itp.) tak w przypadku kamery E50 niestety miałem ciągłe klatkowanie, przycinanie obrazu aż do… rozłączenia się aparatury z kamerą. Na szczęście dron był w zawisie i po zbliżeniu się nim do mnie odzyskał sam połączenie. Sytuacja miała miejsce w centrum miasta, gdzie sprzęt DJI cały czas świeci sygnałem ostrzegającym o interferencjach zewsząd (pełno sieci WiFi). Nie mniej – wcześniejsze dwa loty w tym samym miejscu z kamerą E90 nie pokazywały żadnych problemów.
Podsumowanie testów
Bardzo nie chcę robić podsumowania zero-jedynkowego, bo taki jednostronny wynik nie na najmniejszego sensu w przypadku dronów takich jak Typhoon H/H520 czy jego konkurencja po stronie DJI. Skupię się na subiektywnym wyliczeniu kilku plusów i minusów.

Plusy:
- składany do niewielkich rozmiarów mimo 6 ramion;
- prosta wymiana gimbala razem z kamerą;
- składane podwozie pozwala tworzyć panoramiczne ujęcia jedynie ruchem kamery;
- prosty montaż śmigieł na zatrzaski;
- stabilny lot na dużym wietrze;
- bardzo cichy podczas lotu;
- wygodna aparatura sterująca, lekka jak na swój rozmiar, nie męczy podczas trzymania nawet bez smyczek na szyję;
- większość funkcji wyciągniętych z aplikacji wprost pod przełączniki, przyciski i suwaki na aparaturze;
- nie ma konieczności dołączania dodatkowych urządzeń do podglądu (tablet/smartfon) ani dodatkowych aplikacji jak w przypadku DJI;
- pełne programowanie lotu po siatce lub waypointach z bardzo bogatymi opcjami ustawień kamery;
- możliwość planowania na misji komputerze, importowania przez kartę microSD i exportowania również na kartę razem z logami;
- łatwe pobieranie map w trybie WiFi (w domu) by korzystać z nich off-line podczas latania;
- każda kamera ma swój odbiornik 5.8GHz – z jednej strony dobrze, z drugiej dopóki się nie połączy z kamerą (ok. 1 minuta od uruchomienia) to nie mamy żadnych danych telemetrycznych na tablecie;
- modułowa budowa – możliwość zastosowania wielu różnych kamer razem z gimbalami (bez konieczności konfiguracji, wyważania i ustawiania każdorazowo gimbala z różnymi kamerami);
Minusy:
- przycisk zasilania drona można włączyć przypadkiem podczas wkładania/wyjmowania go z pudełka;
- brak możliwości sprawdzenia statusu baterii bez włączania drona;
- dość słabo widoczne oświetlenie drona nawet w pochmurny dzień;
- nie do końca pasuje mi uzbrajanie i ROZBRAJANIE silników (jeden przycisk blisko sterowania gimbalem, który w którymś z pierwszych lotów niechcący nacisnąłem będąc w powietrzu);
- brak płynności w działaniu podglądu video w przypadku kamery E50 aż do zrywania podglądu a nawet „wykrzaczenia się” DataPilota w otoczeniu z dużą ilością sieci WiFi (w przypadku lotów z E90 – żadnych problemów);
- wolne ładowanie aparatury i szybkie rozładowywanie;
- 2 minuty minimum na połączenie się z kamerą (1 minuta to czas uruchamiania tabletu i kolejna minuta to oczekiwanie na połączenie) – czas ten można skrócić do minuty uruchamiając aparaturę i samego drona jednocześnie;
- brak możliwości pobierania map w czasie rzeczywistym przez sieć komórkową (trzeba robić WiFi-spot np. z telefonu i łączyć się z nim w celu pobrania map w terenie);
Zdaję sobie sprawę, że nie przetestowałem tego sprzętu w zastosowaniach, do których został stworzony czyli np. fotogrametrii niskiego pułapu, więc moje oceny po krótkich testach są wyłącznie subiektywne.
Moim zdaniem Yuneec Typhoon H520 to sprzęt, który idealnie sprawdzi się w trudnym środowisku – do wszelakich inspekcji czy mapowania terenu. Już po pierwszej godzinie lotów czuć, że to sprzęt dla ludzi, którzy cenią sobie porządny kombajn do codziennej pracy: bez setek opcji ustawień, z prostą w obsłudze aplikacją o szerokich zastosowaniach, z wyglądem nie przypominającym drogiej zabawki, lecz porządne narzędzie do określonych celów, z przyjemnym w użytkowaniu radiem RC, gdzie wszystkie potrzebne funkcje są wyciągnięte pod przełączniki i nie trzeba klikać ciągle po ekranie dotykowym. Dla osób ceniących sobie powyższe cechy to będzie dobry wybór.
Moim zdaniem H520 nie przypadnie do gustu osobom, które patrzą na drona jak na gadżet. Biorąc pod uwagę kwestie samej estetyki to Typhoon H520 jest dla tych, których bardziej cieszy widok ciemnego karbonu i matowego wykończenia rodem z ram S900/S1000 niż biały lakierowany plastik jak w DJI Phantom 4.
Koszty
- Koszt Yuneec Typhoon H520 z kamerą E90 w zestawie: 11 858,00 zł – https://aeromind.pl/product-pol-1764-Yuneec-Typhoon-H520-z-kamera-E90.html
- Koszt kamery Yuneec E50: 4 288,00 zł – https://aeromind.pl/product-pol-1766-Kamera-Yuneec-E50-dla-Yuneec-Typhoon-H520.html
Na zakończenie krótka videorelacja z równie krótkich testów ;). Enjoy!
Przeczytaj także:



Jeśli treść powyższego artykułu była dla Ciebie przydatna lub ciekawa możesz postawić mi kawę, którą uwielbiam i motywuje do dalszego pisania ;)




{kind=link}
1 Komentarz
Witam. Fajnie przeczytać artykuł o konkurencji dla DJI, ale po tym co przeczytałem zdecydowanie wybrałbym starsze urządzenie czyli DJI INSPIRE 1v2 zamiast tego Yuneec. Porównanie tego urządzenia do Phantoma 4( nawet w wersji pro) mija się z celem. Nie ta półka cenowa i nie te zastosowania. INSPIRE w mojej ocenie jednak deklasuje ten model, a tu można jedynie dopatrywać się plusa w tym że Yuneec z kamerą termowizyjna kosztuje mniej niż sama kamera termowizyjna do Inspire i to jedyny plus jak dla mnie. W DJI można wykonywać planowanie trasy pod iPad (DJI Ground Station Pro). Wbudowanego ekranu też bym nie zaliczył na plus a raczej na minus (w czym nawet mój znajomy z Yuneec Q520 przyznał rację). Lepiej mieć możliwość zamiany np. z 7-8 cali na 10cali albo zmieniać między jakością wyświetlaczy (można mieć iPada, Samsunga Galaxy tab,albo świetny ekran DJI CrystalSky – wszystko Zależy od finansów, i tego do czego chcemy, oraz w jakich warunkach używać nasz statek powietrzny ?). No i technologia Wifi w stosunku do Lightbridge też jednak odbiega na minus (słabe porównanie ale kiedyś miałem parrota bebop’a- nigdy więcej wifi) ?. Fajnie że jest tutaj 6silnikow zawsze to bezpieczniejsze niż 4 ale wydaje mi się że Inspire 1v2 byłby lepiej prowadzącym się i statecznienszym dronem.